on wikipedia it states:
there need not be a continuous deformation for two spaces to be homeomorphic — only a continuous mapping with a continuous inverse function.
I'm trying to intuitively understand this difference between a continuous mapping and continuous deformation, so I'm trying to find an example of two spaces that are homeomorphic but without a continuous deformation.
Here is a definition of homotopy:
Formally, a homotopy between two continuous functions f and g from a topological space X to a topological space Y is defined to be a continuous function H : X × [0,1] → Y from the product of the space X with the unit interval [0,1] to Y such that, if x ∈ X then H(x,0) = f(x) and H(x,1) = g(x)
Does the following example satisfy?
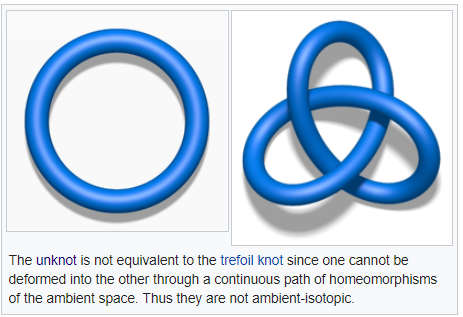
In a sense there is no continuous deformation between the two (though I honestly cannot immedately see from the definition why not. i.e. I cannot see why simply letting the different parts of the knot "move through" each other is not allowed by the formal definition of homotopy.)

$\newcommand{\Reals}{\mathbf{R}}$Since this has gotten bumped:
tl; dr: Comparing homeomorphism (a relation between two topological spaces) and homotopy (a relation between two mappings) is a recipe for confusion. Informal, qualitative descriptions of topology do not help, since they frequently use language such as "continuous deformation", which can be interpreted in either sense.
Let $X$ and $Y$ be topological spaces, and let $f$, $g:X \to Y$ be continuous mappings.
Homeomorphism: A mapping $f:X \to Y$ is a homeomorphism if $f$ is continuous and invertible, and its inverse is continuous. If there exists a homeomorphism $f:X \to Y$, we say the topological spaces $X$ and $Y$ are homeomorphic.
Homotopy: In the loosest sense, two continuous mappings $f$ and $g:X \to Y$ are homotopic if there exists a continuous mapping $H:X \times [0, 1] \to Y$ such that $H(x, 0) = f(x)$ and $H(x, 1) = g(x)$ for all $x$ in $X$.
(For technical reasons, it's usually desirable to fix a "basepoint" in each topological space and to assume all mappings send basepoints to basepoints, or in fancy terms to work in the category of pointed spaces. Since the aim here is merely to formalize qualitative descriptions of topology for posterity, we'll ignore basepoints.)
Isotopy: Along the lines of Paul Frost's comment, we can combine these two concepts. First, we say a mapping $f:X \to Y$ is an embedding if $f$ is a homeomorphism onto its image, i.e., an injective mapping with continuous inverse.
If $f$ and $g:X \to Y$ are embeddings, we say $f$ and $g$ are isotopic, or homotopic through embeddings, if there exists a homotopy $H:X \times [0, 1] \to Y$ such that for each $t$ with $0 \leq t \leq 1$, the mapping $H_{t} = H( \cdot, t):X \to Y$ is an embedding.
Let's see how these concepts differ.
The identity mapping $I_{X}:X \to X$ is a homeomorphism. Every mapping $f:X \to Y$ is homotopic to itself. Every embedding $f:X \to Y$ is isotopic to itself. A non-embedding $f:X \to Y$ is not isotopic to anything, because the definition above makes no sense for non-embeddings.
Any two mappings $f$, $g:X \to \Reals^{n}$ into a Cartesian space are homotopic (because we are working with "unpointed" spaces). The standard argument is to use the straight line homotopy $$ H(x, t) = (1 - t)f(x) + tg(x) = f(x) + t(g(x) - f(x)), $$ which connects the points $f(x)$ and $g(x)$ by a line segment, and then simultaneously "deforms" along these segments as $t$ runs from $0$ to $1$.
Let $X$ denote the unit circle, which we'll represent as the set of points $(x, y) = (\cos\theta, \sin\theta)$ in the Cartesian plane.
The proper notion of topological equivalence depends on context, and quickly becomes subtle even in situations, such as a plane circle and a trefoil knot, that appear qualitative and simple.